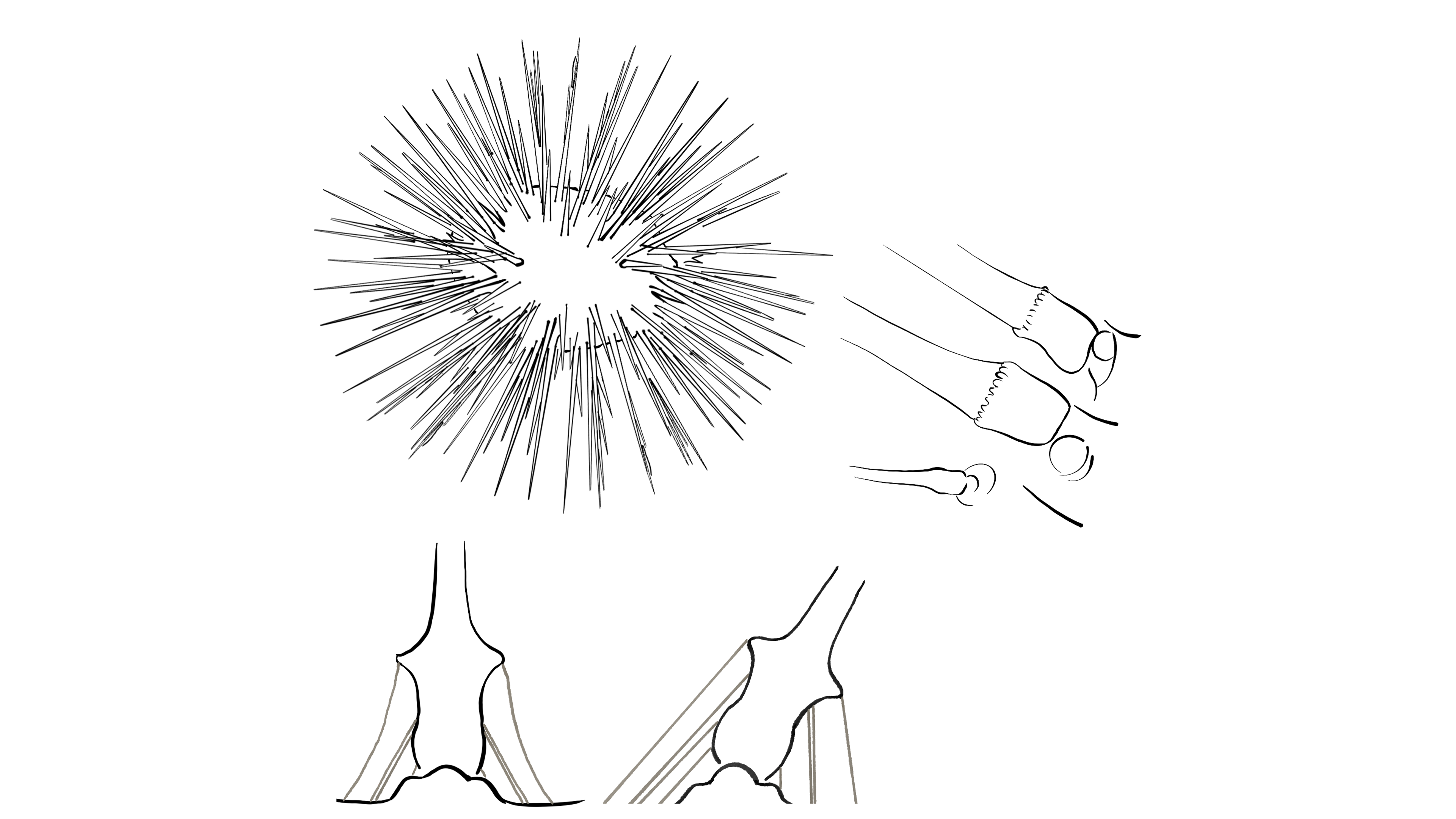
Biological Principle
to
Mechanical Strategy
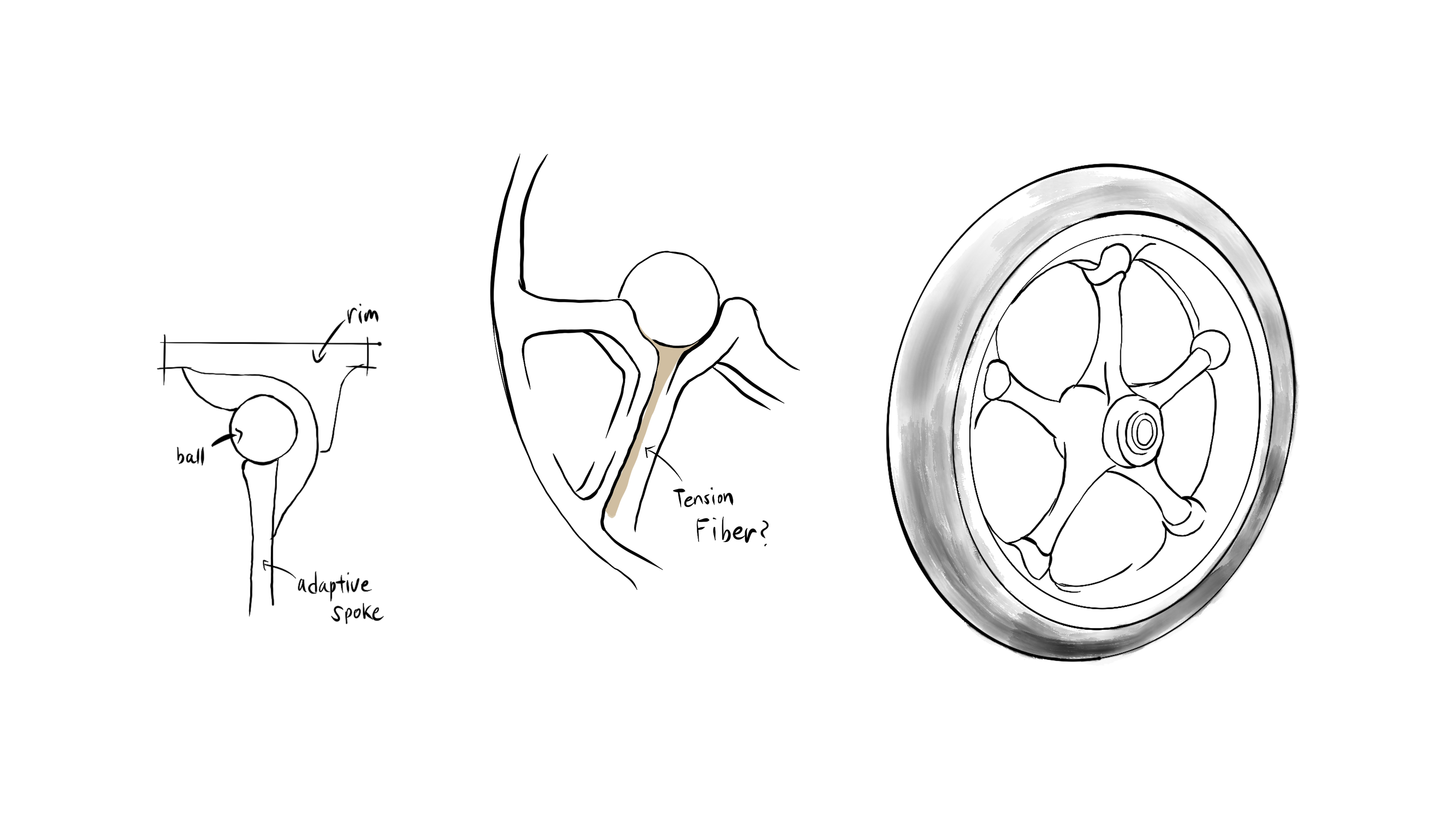
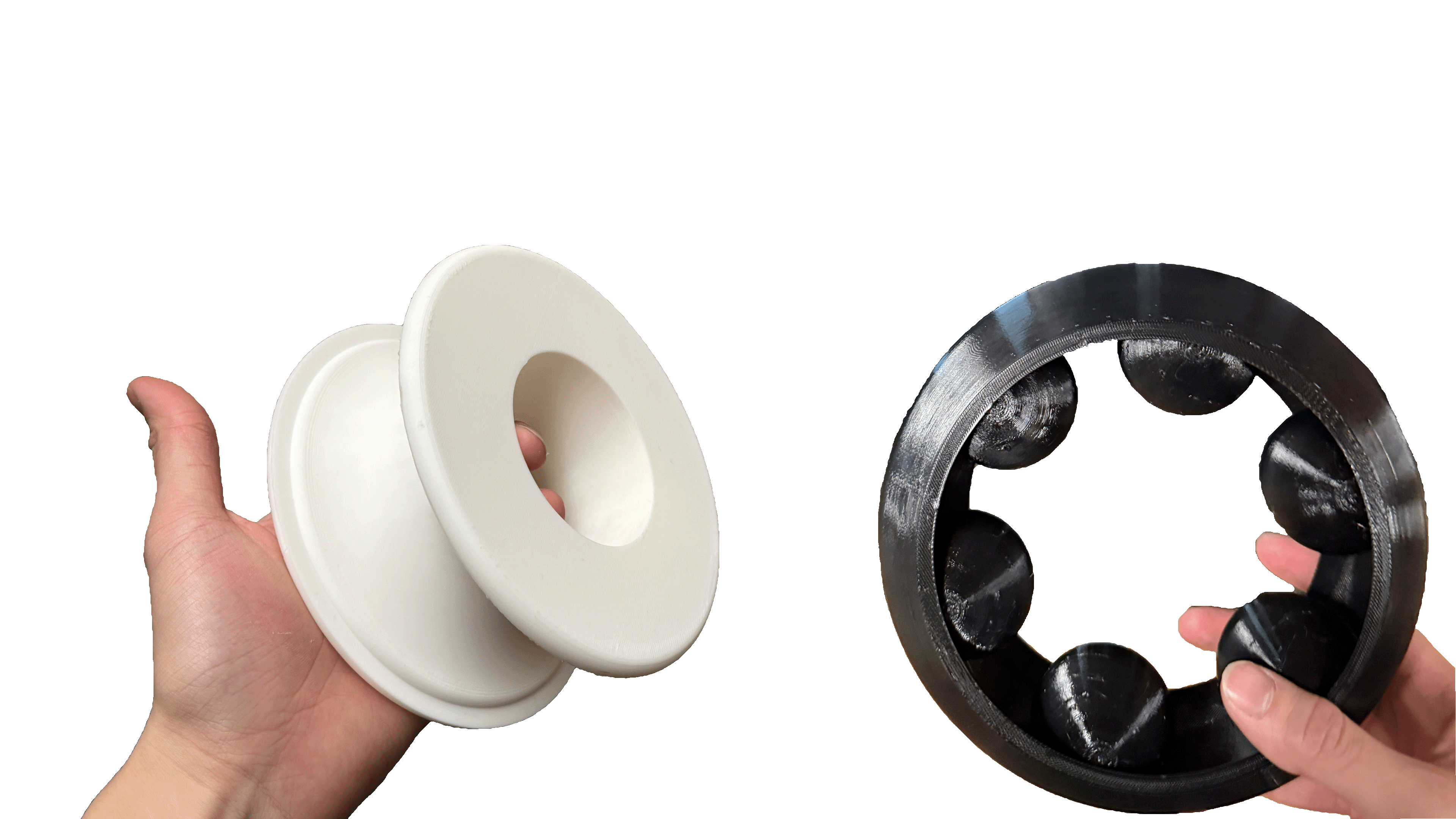
- Flexible Joint -> Elastic Sphere Articulation
- Load-induced stiffening -> Deeper Socket Engagement
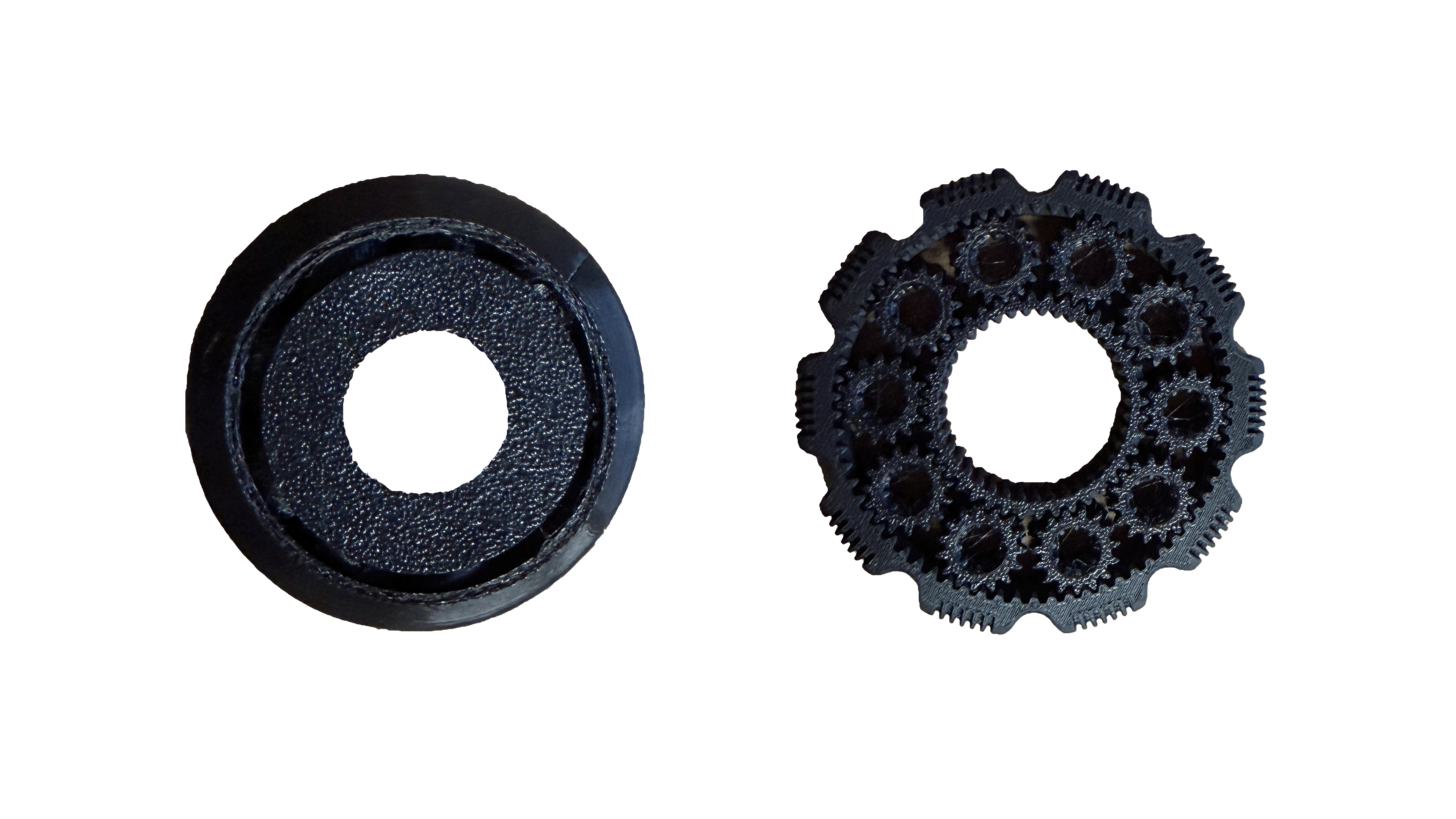
- Structural Locking -> Alternating soft and rigid zones
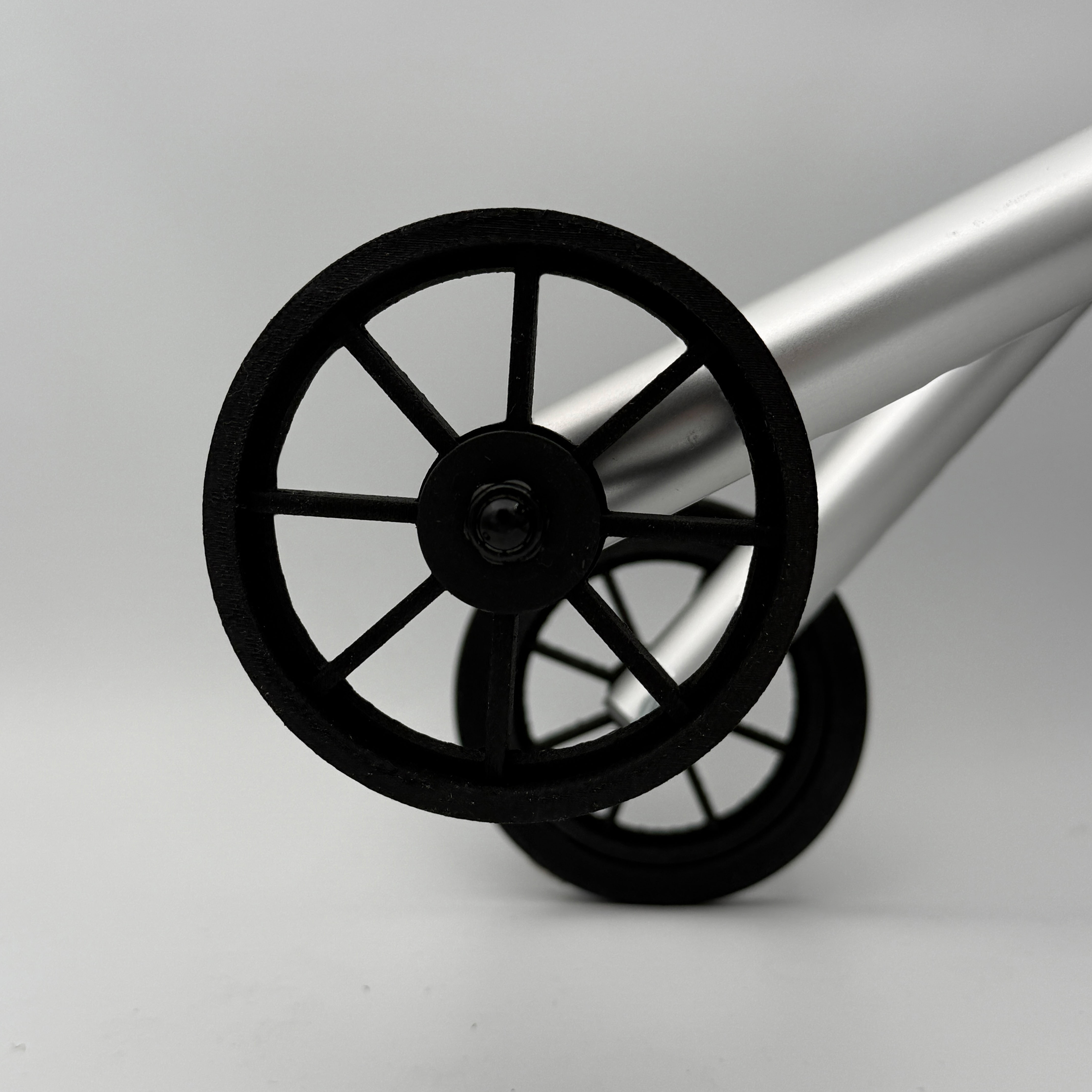
The result is a wheel cross-section that adapts dynamically to terrain.